1.开始
1.1 roscore
首先确保roscore已经运行, 打开一个新的终端:
1.2turtlesim
在本教程中我们也会使用到turtlesim,请在一个新的终端中运行:
1.3通过键盘远程控制turtle
我们也需要通过键盘来控制turtle的运动,请在一个新的终端中运行:
1.4使用 rqt_graph
rqt_graph能够创建一个显示当前系统运行情况的动态图形。rqt_graph是rqt程序包中的一部分。如果你没有安装,请通过以下命令来安装:
在一个新终端中运行:
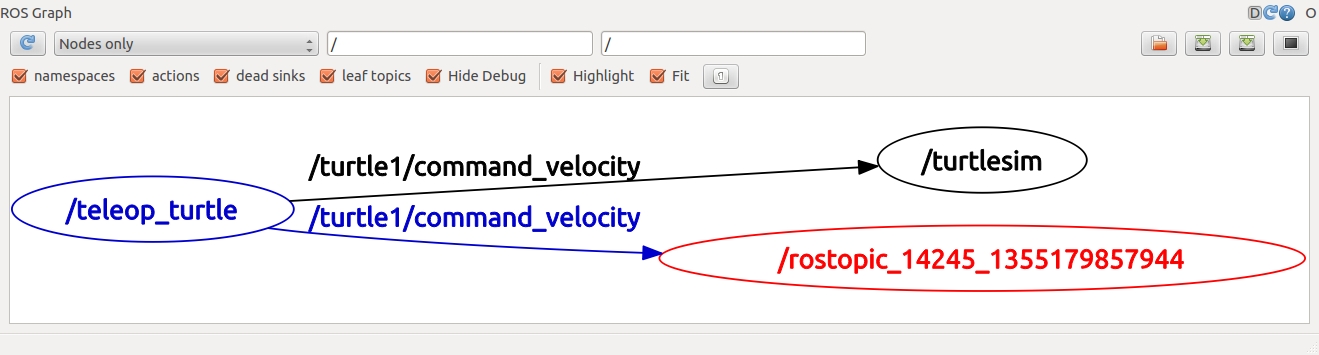
就会弹出rqt_graph窗口

2.『ROS Topics』
如上图所示:
turtlesim_node节点和turtle_teleop_key节点之间是通过一个ROS话题来互相通信的。turtle_teleop_key在一个话题上发布按键输入消息,而turtlesim(这里是my_turtle)则订阅该话题以接收该消息。
2.1.rostopic介绍
rostopic命令工具能让你获取有关ROS话题的信息。
2.1.1你可以使用帮助选项查看rostopic的子命令:
|
|
|
|
2.1.2rostopic echo可以显示在某个话题上发布的数据
让我们在一个新终端中看一下turtle_teleop_key节点在 /turtle1/cmd_vel话题上发布的数据。
你可能看不到任何东西因为现在还没有数据发布到该话题上。接下来我们通过按下方向键使turtle_teleop_key节点发布数据。记住如果turtle没有动起来的话就需要你重新选中turtle_teleop_key节点运行时所在的终端窗口。
现在当你按下向上方向键时应该会看到下面的信息:
现在让我们再看一下rqt_graph(你可能需要刷新一下ROS graph)。正如你所看到的,rostopic echo(红色显示部分)现在也订阅了turtle1/command_velocity话题。
2.1.3使用 rostopic list
rostopic list能够列出所有当前订阅和发布的话题。
让我们查看一下list子命令需要的参数,在一个新终端中运行:
在rostopic list中使用verbose选项:
这会显示出有关所发布和订阅的话题及其类型的详细信息。
3.ROS Messages
话题之间的通信是通过在节点之间发送ROS消息实现的。对于发布器(turtle_teleop_key)和订阅器(turtulesim_node)之间的通信,发布器和订阅器之间必须发送和接收相同类型的消息。这意味着话题的类型是由发布在它上面的消息类型决定的。使用rostopic type命令可以查看发布在某个话题上的消息类型。
3.1使用 rostopic type
rostopic type 命令用来查看所发布话题的消息类型。
用法:
hydro版请运行:
你应该会看到:
|
|
我们可以使用rosmsg命令来查看消息的详细情况:
hydro版:
|
|
现在我们已经知道了turtlesim节点所期望的消息类型,接下来我们就可以给turtle发布命令了。
4.继续学习 rostopic
现在我们已经了解了什么是ROS的消息,接下来我们开始结合消息来使用rostopic。
4.1使用 rostopic pub
rostopic pub可以把数据发布到当前某个正在广播的话题上。
用法:
示例(hydro版):
以上命令会发送一条消息给turtlesim,告诉它以2.0大小的线速度和1.8大小的角速度开始移动。
这是一个非常复杂的例子,因此让我们来详细分析一下其中的每一个参数。
这条命令将会发布消息到某个给定的话题。
|
|
(单个破折号)这个参数选项使rostopic发布一条消息后马上退出。
|
|
这是消息所发布到的话题名称。
|
|
这是所发布消息的类型。
|
|
(双破折号)这会告诉命令选项解析器接下来的参数部分都不是命令选项。这在参数里面包含有破折号-(比如负号)时是必须要添加的。
|
|
正如之前提到的,在一个turtlesim/Velocity消息里面包含有两个浮点型元素:linear和angular。在本例中,2.0是linear的值,1.8是angular的值。这些参数其实是按照YAML语法格式编写的,这在YAML文档中有更多的描述。
你可能已经注意到turtle已经停止移动了。这是因为turtle需要一个稳定的频率为1Hz的命令流来保持移动状态。我们可以使用rostopic pub -r命令来发布一个稳定的命令流(非hydro版):
hydro版:
这条命令以1Hz的频率发布速度命令到速度话题上。
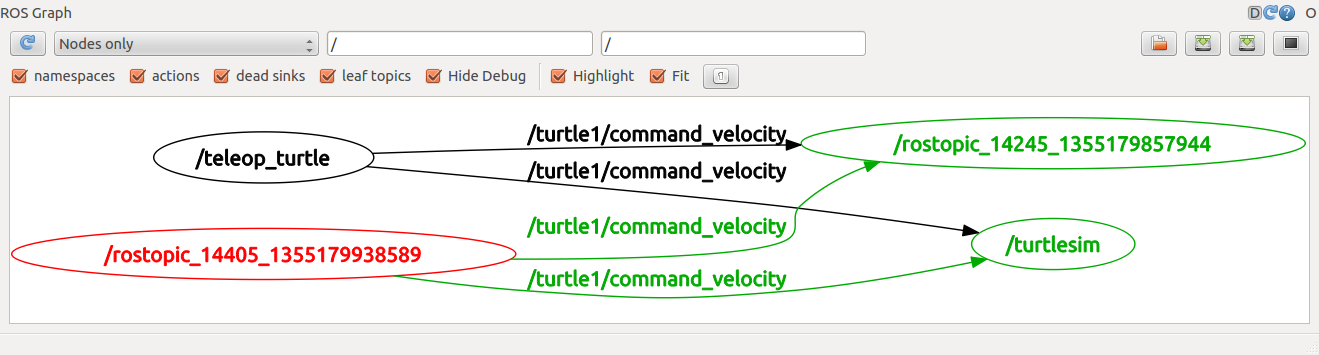
我们也可以看一下rqt_graph中的情形,可以看到rostopic发布器节点(红色)正在与rostopic echo节点(绿色)进行通信:
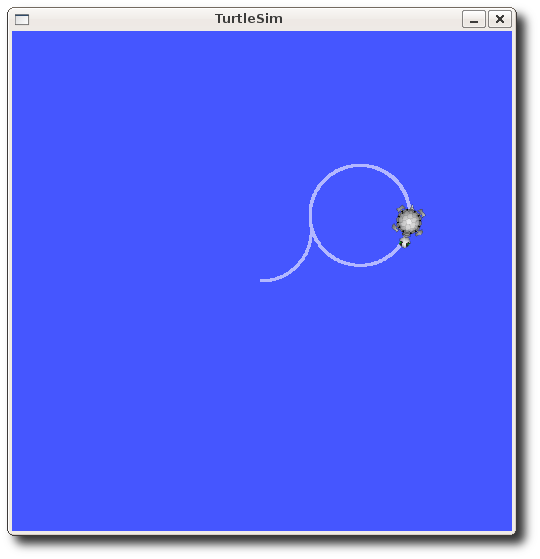
正如你所看到的,turtle正沿着一个圆形轨迹连续运动。我们可以在一个新终端中通过rostopic echo命令来查看turtlesim所发布的数据。
4.2使用 rostopic hz
rostopic hz命令可以用来查看数据发布的频率。
用法:
我们看一下turtlesim_node发布/turtle/pose时有多快:
你会看到:
现在我们可以知道了turtlesim正以大约60Hz的频率发布数据给turtle。我们也可以结合rostopic type和rosmsg show命令来获取关于某个话题的更深层次的信息(非hydro版):
hydro版:
到此我们已经完成了通过rostopic来查看话题相关情况的过程,接下来我将使用另一个工具来查看turtlesim发布的数据。
5.使用 rqt_plot
注意:如果你使用的是electric或更早期的ROS版本,那么rqt命令是不可用的,请使用rxplot命令来代替。
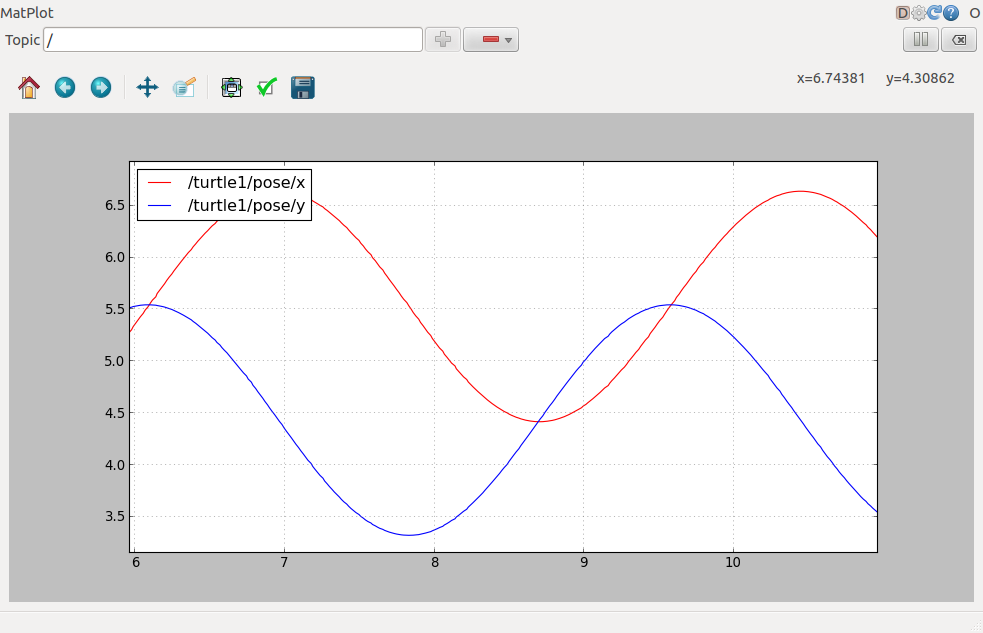
rqt_plot命令可以实时显示一个发布到某个话题上的数据变化图形。这里我们将使用rqt_plot命令来绘制正在发布到/turtle1/pose话题上的数据变化图形。首先,在一个新终端中运行rqt_plot命令:
这会弹出一个新窗口,在窗口左上角的一个文本框里面你可以添加需要绘制的话题。在里面输入/turtle1/pose/x后之前处于禁用状态的加号按钮将会被使能变亮。按一下该按钮,并对/turtle1/pose/y重复相同的过程。现在你会在图形中看到turtle的x-y位置坐标图。
按下减号按钮会显示一组菜单让你隐藏图形中指定的话题。现在隐藏掉你刚才添加的话题并添加/turtle1/pose/theta,你会看到如下图所示的图形: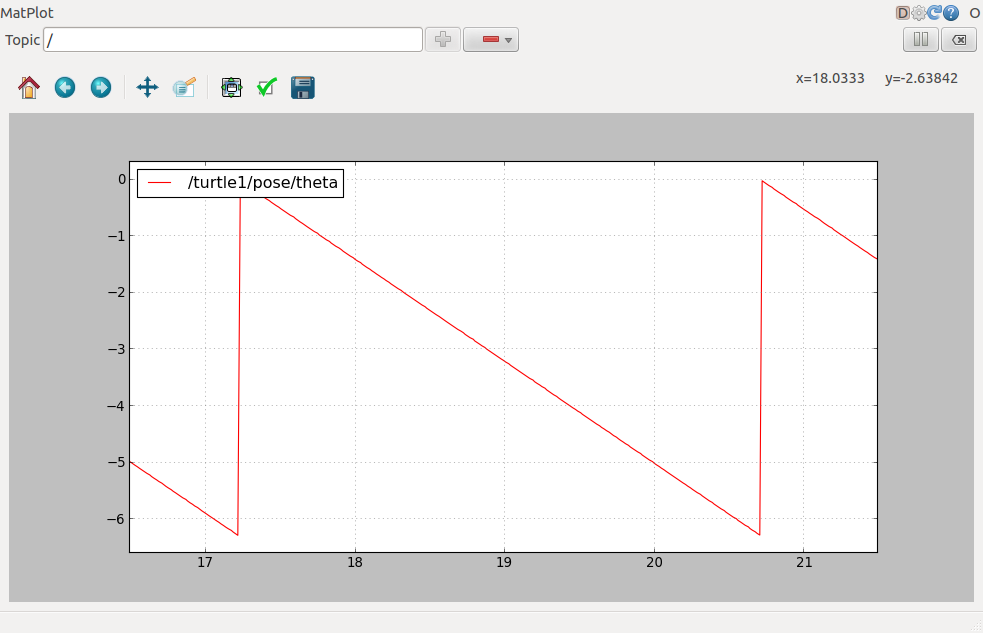
本部分教程到此为止,请使用Ctrl-C退出rostopic命令,但要保持turtlesim继续运行。
到此我们已经理解了ROS话题是如何工作的,接下来我们开始学习理解ROS服务和参数。
来自:
理解ROS话题
本教程介绍ROS话题(topics)以及如何使用rostopic 和 rqt_plot 命令行工具。